TORQ
TORQ is a portable doorknob attachment designed for people with arthritis or hand dexterity issues. It quickly converts round doorknobs into an easy-to-use lever, reducing the grip strength and wrist rotation needed to open doors with doorknobs, helping users live more independently.
As part of a small team of 4 designers, we are working on TORQ, developing both its aesthetics and functionality through the use of both parametric and direct modeling methods.
The Goal
Our goal with TORQ is to create an accessibility device that allows individuals with hand dexterity issues to overcome the challenge of opening doors that utilize doorknobs. We hope to reduce the gripping effort necessary by as much as possible.
The Process
User Needs Identification
Through various online surveys and by getting in contact with individuals who suffer from arthritis, we collected a few key needs for our product:
- Reduce the need to bend fingers as much as possible
- Make it portable
- Make it look sleek, not medical
Initial Designing & Low-Fidelity Prototyping
We began with a wide array of designs. We took each need and developed a design that uniquely solved each one. As we continued prototyping and testing, we picked our best ideas and began merging them together to create a product that satisfies all of the needs listed above. This led us to our final idea:
The Squeeze Design
This design reduces the gripping strength necessary to grasp a doorknob while maintaining a sleek look.
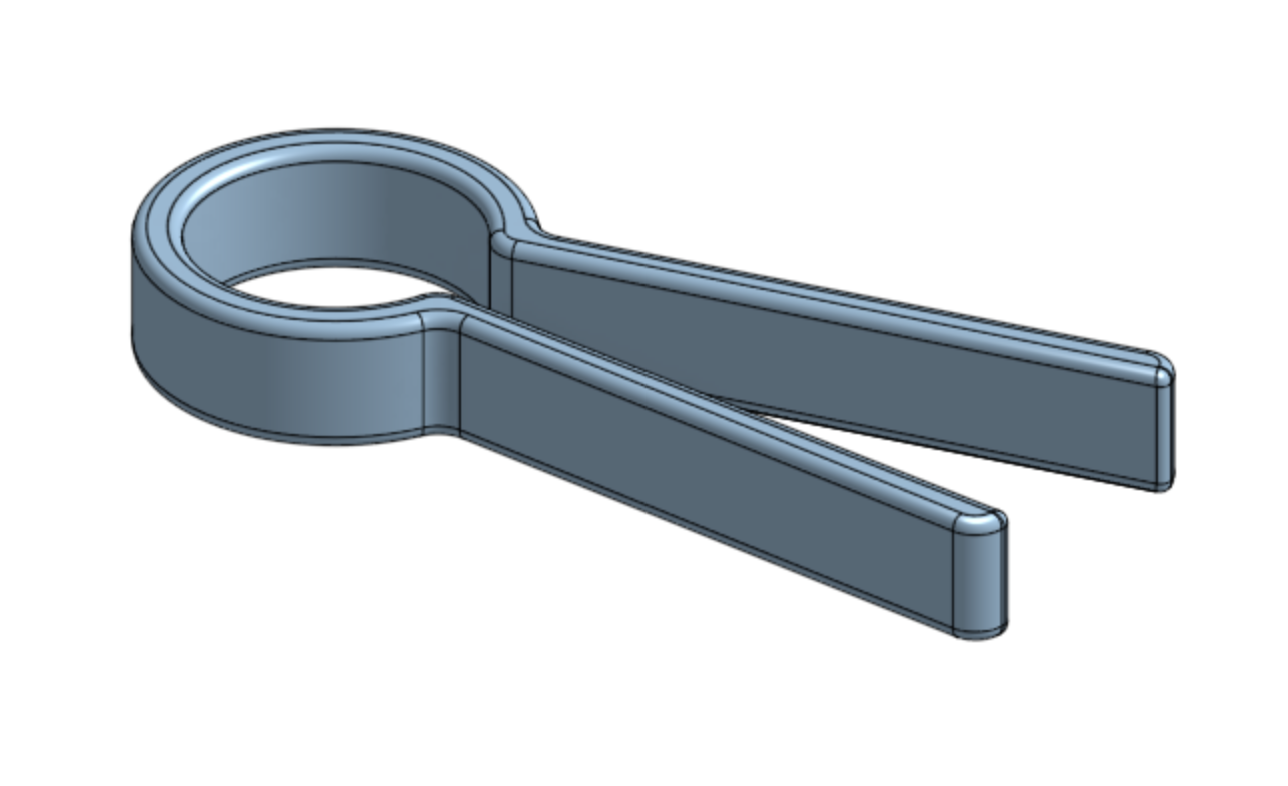
CAD model of TORQ
Why it works
- Clean, sleek design
- Portable, similar in size to a phone
- Easy to manufacture and rapidly alter as necessary
The Final Prototype
Ultimately, our final prototype was 3-D printed and sanded for a clean finish. At the final presentation of our project, we allowed dozens of users to test the product, receiving overwhelming positive reviews and critical feedback for future iterations.
Next Up
To validate the function of our prototype, we created it to fit one size very well. To make a more universal product in the future, we have a few changes we'll make. First, we'll change the shape of the gripping part itself to be a hyperbolic curve so that it can interface with a wider variety of circular, bulbous doorknobs. Next, we'll create the handles out of a more ergonomic material to prevent hands from slipping off while the product is being used.
More information on the process and images coming soon.